
Disney Research Zurich and ETH have created a wall-climbing robot capable of driving on the ground and then transition to climb up vertical walls.
The new all-terrain robot is called ‘VertiGo’.
It has two tiltable propellers that provide thrust onto the wall, and four wheels. One pair of wheels is steerable, and each propeller has two degrees of freedom for adjusting the direction of thrust.
It is capable of moving on a wall quickly and with agility and thanks to the thrust of its propellers it can travel over indentations such as masonry.
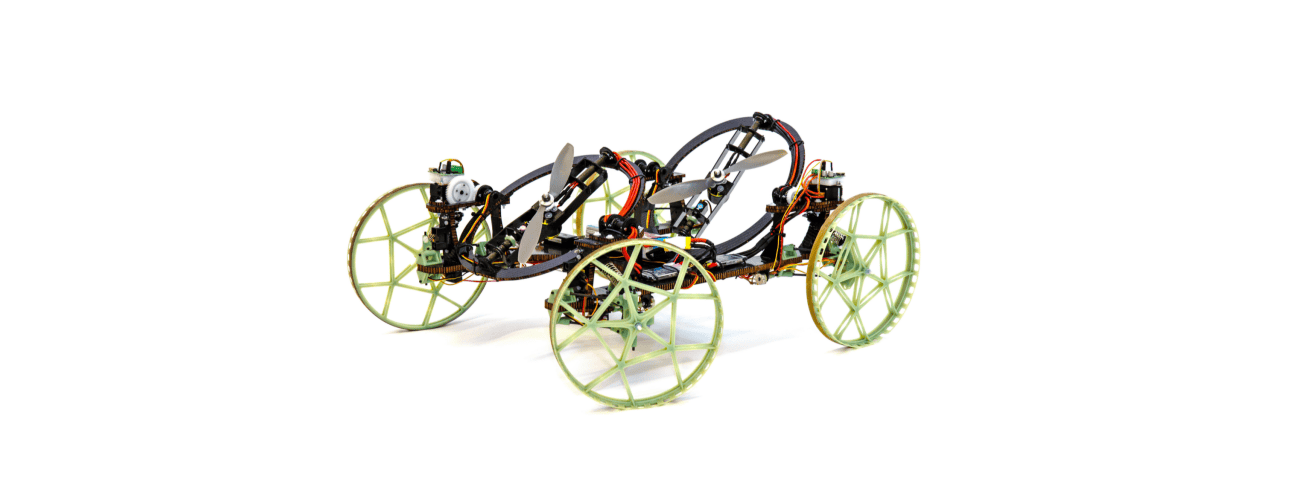
The ‘VertiGo’ wall-climbing robot.
Disney Research provided more information on the robot on its website:
“A key research problem in the deign of VertiGo robot was to maximize the ratio between thrust output and vehicle weight. Weight is minimized by using a central carbon fibre baseplate, while 3D-printed parts in conjunction with carbon-rods are used for more complex three dimensional structures like the wheel suspension or the wheels themselves.
“The baseplate provides mounting points for two thruster modules and the wheel suspensions. It also serves as carrier for all the electronic parts and wires. The thrusters are mounted using a two-ringed Cardan Suspension. Integrated servomotors allow the inner and outer ring to be moved independently from one another.
“This supports the generation of all the forces required to drive on the floor, on walls and theoretically even on the ceiling. The wheels are mounted with a double wishbone suspension based on modelcar oil dampers, but they are not propelled in any way.”
Video of the VertiGo in action:
But what does Disney Research plan on doing with its new wall-climbing robot? Paul Beardsley provided somewhat of an answer in an interview with IEEE Spectrum, in which he is quoted as saying:
“About why Disney is interested in this area, I am not able to say specifics as you can understand. But just speaking in general, one can imagine that robots with lighting effects could be useful for entertainment effects or for wall games.”
He added:
“This also relates to the question of why the ground-wall transition is useful. If you have to manually place a robot on a wall at the start of a deployment, and manually remove it at the end, then that’s taking manpower and it’s not flexible.
“If the robot can make those transitions automatically, then you are a step in the direction of autonomous deployment, and that makes the technology more powerful. We are motivated by making a practical device, so it is real-world feedback and challenges that drive our work.”