
One of the biggest challenges that offshore wind farms face is expensive maintenance and repairs. This is because of harsh environmental conditions, such as high winds, strong currents, and powerful waves. All these factors mean that equipment wears more quickly, requiring regular maintenance which can be dangerous and for human crews who have to frequently go and check on the machinery.
One promising solution that could help address these challenges is using smart underwater robots, capable of carrying out repairs and all that on their own.
However, traditional underwater robotic systems aren’t that great at predicting when they will be hit by waves, which means they can’t hold their position well and fail to perform the tasks that they were deployed to carry out.
So, what’s the solution? Making underwater robotic systems “smarter” so that they can handle unpredictable ocean waves.
And this is precisely what researchers at the University of Edinburgh set out to address: how to make underwater robots more stable and perform maintenance on offshore wind and tidal farms even in rough ocean conditions.
If underwater smart robots can predict incoming waves, using real-time data, including height, speed and direction, they can adjust their position and hold a steady position. This gives the robots much less need for human intervention to keep them up and running.
And because there’s less human intervention required with these smart underwater robots, it also provides savings in operational costs.
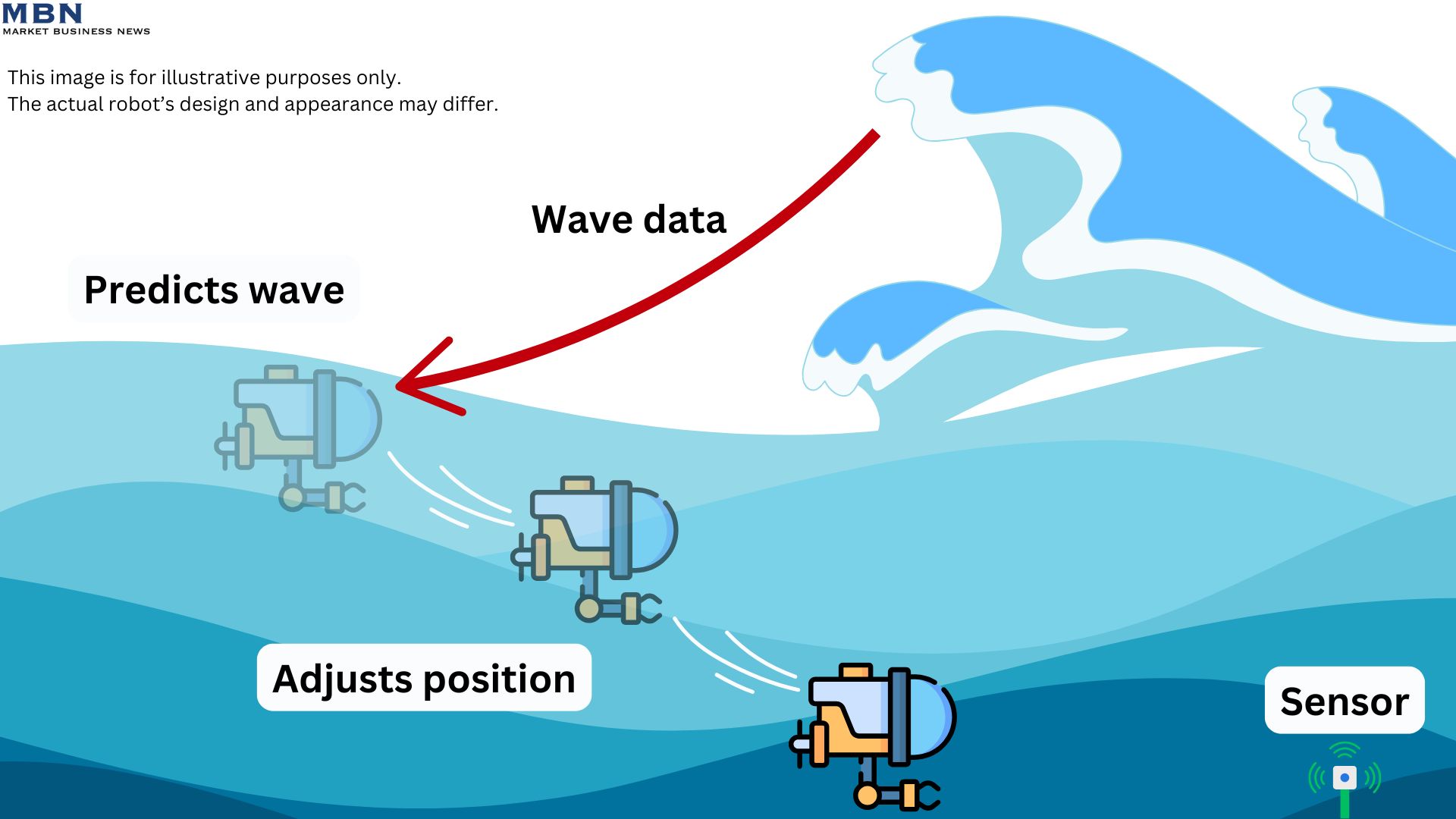
So how do these smart underwater robots work? Thanks to a Nonlinear Model Predictive Controller (NMPC) and a Deterministic Sea Wave Predictor (DSWP).
The DSWP analyzes everything it can about waves, such as height, direction, and frequency. The DSWP processes incoming wave data to forecast the immediate future of the wave environment. It sends this information to the NMPC. If there’s a wave coming, the NMPC calculates how the robot should change its position to stay stable. The robots are equipped with stabilizers which respond to the NMPC instructions.
Dr Kyle Walker, who developed the work as part of his PhD at the University of Edinburgh, said: “A major limitation at present is robots’ ability to perceive and counteract environmental disturbances effectively, which fundamentally restricts the current use of small subsea vehicles. By forming a prediction of future wave disturbances and integrating this within the control system, we’re able to expand this range with little to no change to the robot hardware.
“In terms of translating this technology into the field, this is a huge benefit and makes our system applicable to most vehicles currently available on the market.”
Reference:
Walker KL, Jordan L-B, Giorgio-Serchi F. Nonlinear model predictive dynamic positioning of a remotely operated vehicle with wave disturbance preview. The International Journal of Robotics Research. 2024;0(0). doi:10.1177/02783649241286909